Why All LiDAR Sensors Aren't Created Equal
This article explores LiDAR differences and why customers use multiple vendors to meet their needs.

With decades of experience working with various LiDAR vendors and the compatibility of Outsight's Shift Platform with all relevant ones, we often get asked: which is the best LiDAR sensor?
The reality is that, unlike cameras, which are technically similar and use the same technology principles, devices using LiDAR technology can be made in many different ways. Therefore, the best solution can only be determined for a specific context.
Recommended Readings
First, it's highly recommended to read these two key articles to understand what is LiDAR and how Lidar works:
The key principles of this amazing 3D sensing technology

The differences between LiDARs
The following are some of the variables a manufacturer must choose to build their device:
| Variable | Most popular | Other Options |
|---|---|---|
| Device type | Rotating | Dome-like, Narrow Field of View |
| Illumination technique | Scanning | Flash, Hybrid |
| Detection method | Direct Time of Flight | FMCW, Others |
| Laser technology | Diode | Fiber Laser, Others |
| Peak power (Range) | Kilowatts | Tens of Watts |
| Laser Wavelength | 905nm | 1550nm, 1064nm, 840nm |
| Receiver technology | Silicon | InGaaS, Others |
| Horizontal Field of View | 360º | From 20º to 360º |
| Vertical Field of View | 30º | From 20º to 360º |
| Angular Resolution | Tenth of degrees | Degrees |
| Frame-rate | 20fps | 10fps, Up to 1000fps |
| Points per second | Millions | Hundreds or Tens of Thousands |
| Range | Tens of Meters | Hundreds of Meters |
| Pattern | Repetitive | Random, Others |
| Reflectivity data | Yes | No, Yes with additional data |
| Laser Hits per azimuth | Single | Double, Multiple |
| Network Protocol | UCP | TCP, Proprietary |
In reality, not all variables are independent (e.g., resolution depends on others like FoV, points per second, and frame rate), but there are still many different possibilities.
A key question is: is there any value for the end user in creating different sensor configurations?
Let's use just one of these variables to see how this concretely translates into advantages and disadvantages for the user.
Choosing the right Field of View
Different vendors propose multiple lidar sensors configurations.
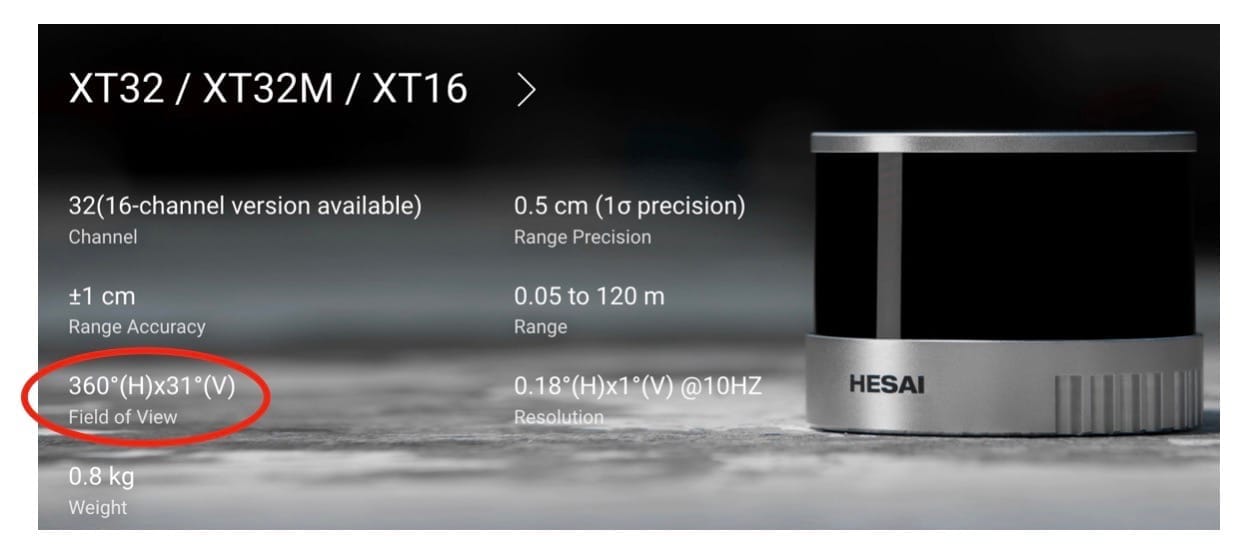
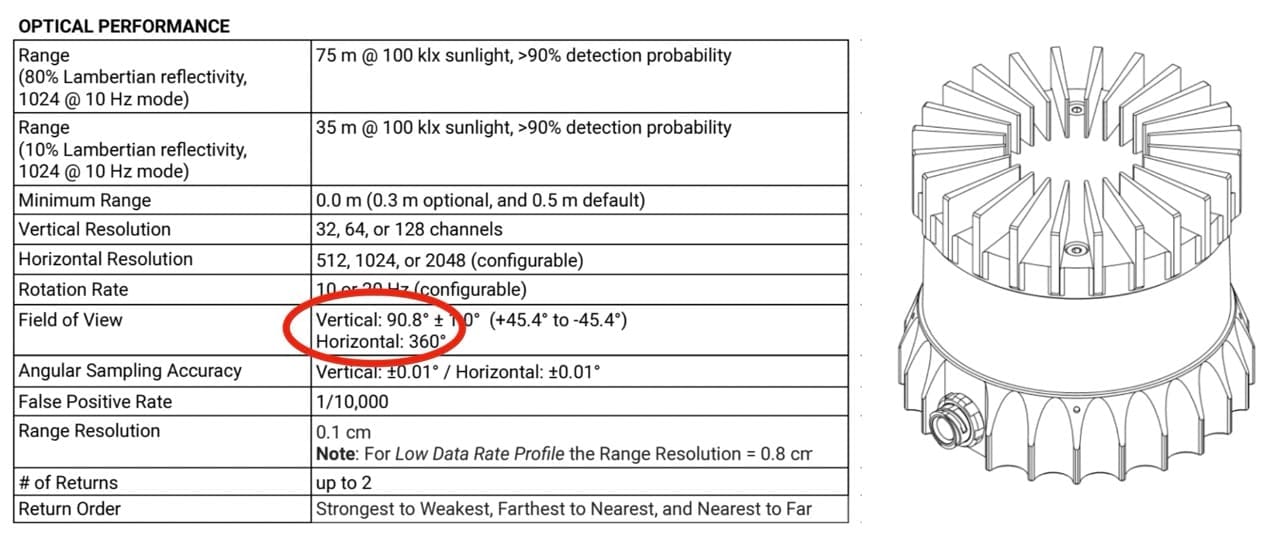
For instance the lidar scanner Hesai XT-32 has a Horizontal Field of View of 360º and 31º vertically and Ouster OS-0 some 90º in vFoV (both Rotating LiDARs).
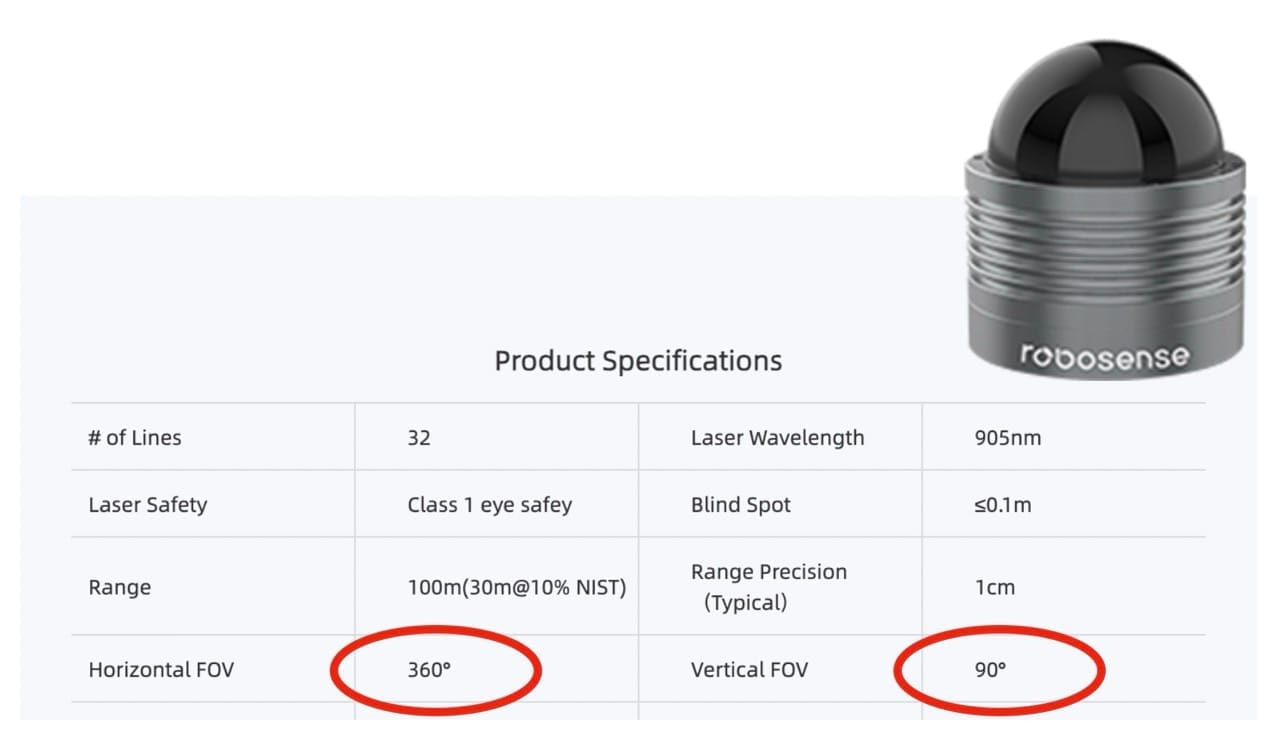
Robosense's Bpearl illuminates the scene in similar FoV but using a Dome-like pattern, while Seyond Falcon K LiDAR focus its laser energy in a 120º x 25º FoV.

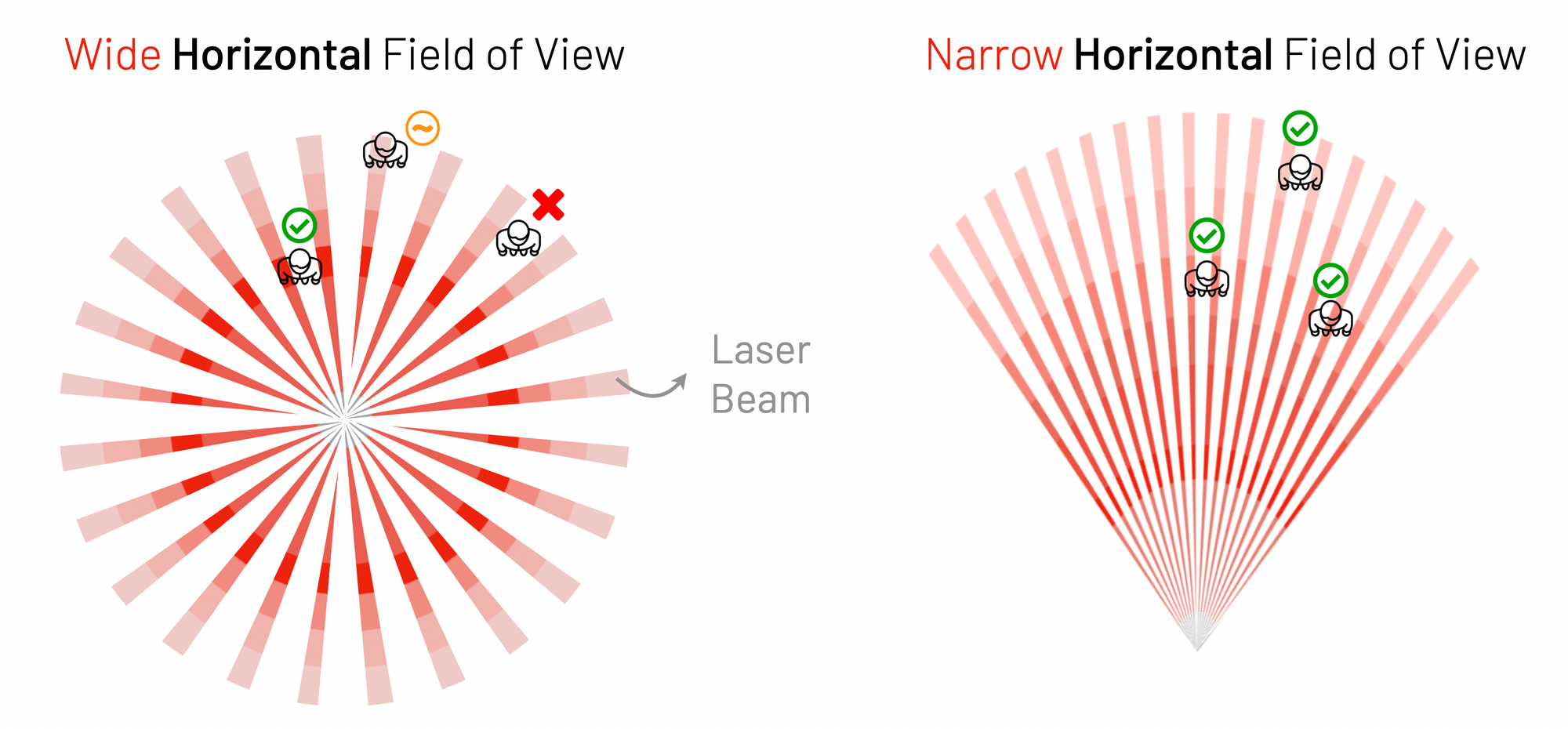
For a given total energy budget, illuminating a wider field of view comes with drawbacks like lower Detection range and/or Resolution.
The figure below illustrates the consequences in detecting persons depending on the chosen trade-offs:
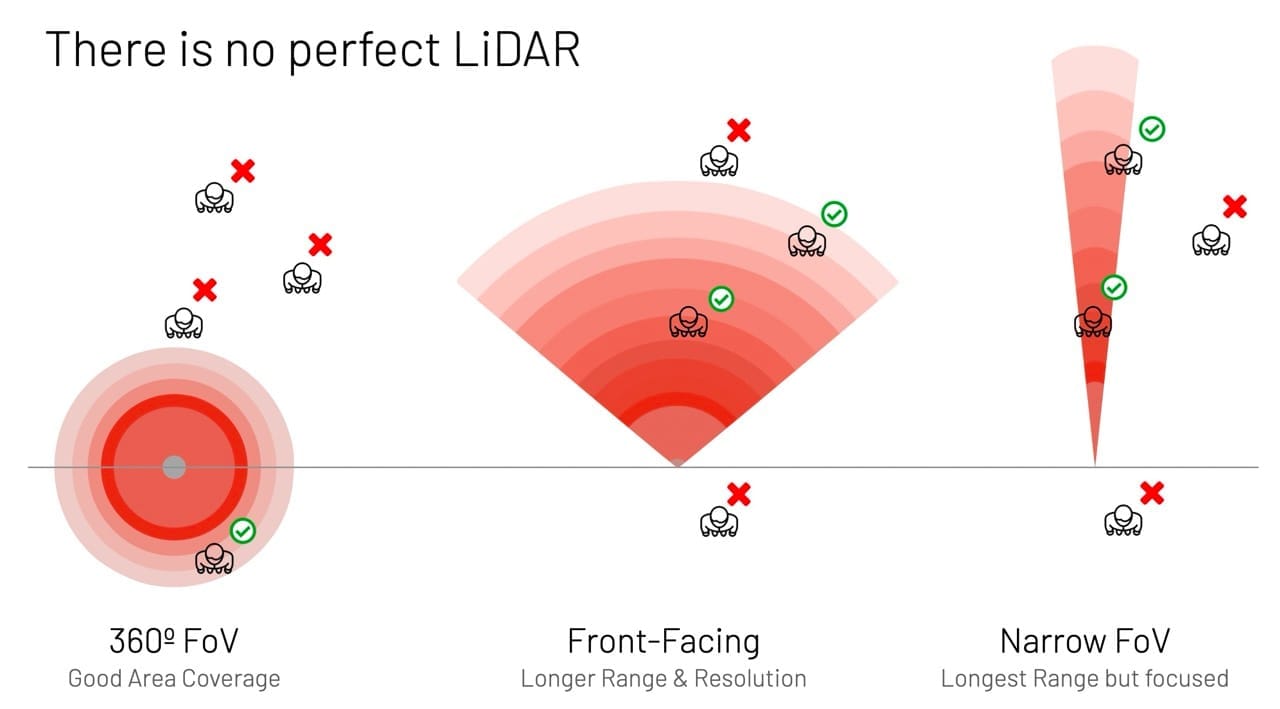
In reality, this drawing is too simplistic. It depicts the detection zone as a continuous field, while in fact, the laser pulses are fired at specific angles, creating blind zones that can be large enough to cause missed detections:
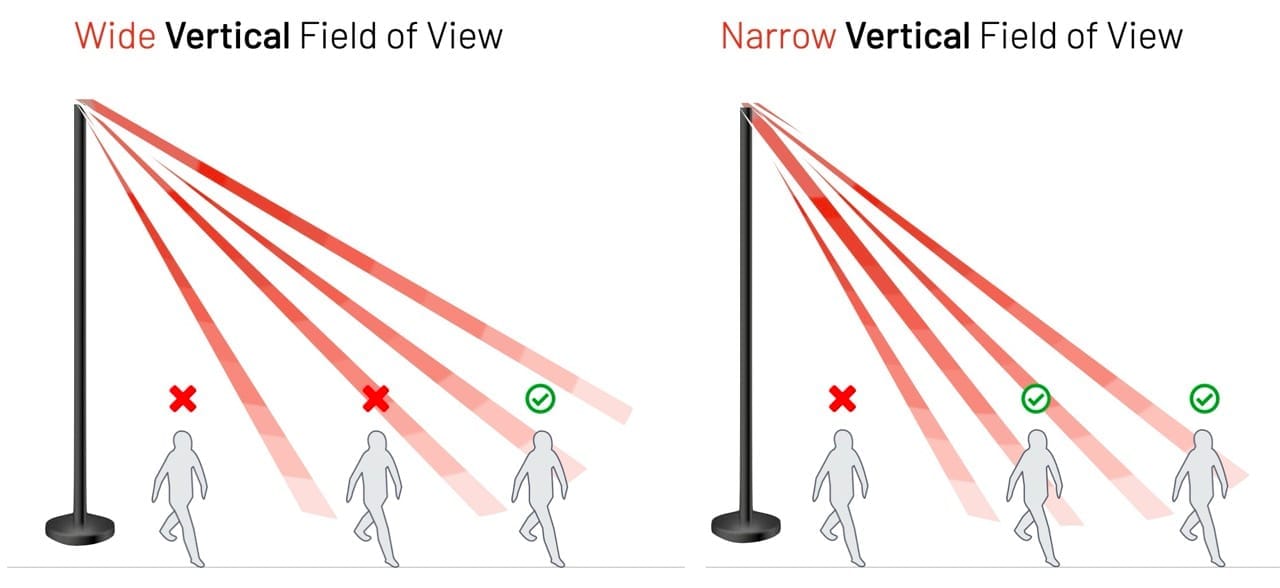
To make things even more interesting, don't forget the Vertical Field of View and Vertical Angular Resolution, which can vary greatly between sensors:
What about sensor cost?
If your application can't accept these missed detections, a quick and easy solution is to add higher-resolution and wider field-of-view sensors, but this comes with a cost.
Each sensor design choice relies on very different underlying technologies:
A manufacturer using a fiber laser solution with an InGaAs detector will achieve much longer ranges [see our article on the Details of LiDAR for more information], but the bill of materials and manufacturing costs will be much higher than using CMOS-based Diode LiDAR.
This huge difference creates tremendous room for optimization—or overpaying if the wrong hardware is used. In many cases, a combination of cheaper sensors may deliver better results and lower total cost of ownership (including setup, networking, and processing costs) than using high-cost ones.
Welcome to Hardware Freedom
On the same premises, they need to simultaneously monitor narrow, long aisles indoors with low-height ceilings, large halls with high ceilings, as well as track vehicles outdoors over wide open parking areas.
This requires using the right combination of sensors and manufacturers for the right context, in order to optimize performance and cost.
In this context, two key modules of our solution address the complexity of choosing and using the right combination of LiDAR manufacturers and models: a multi-Vendor Simulation tool during the design phase and a Lidar-Agnostic Processing module during the operations phase.
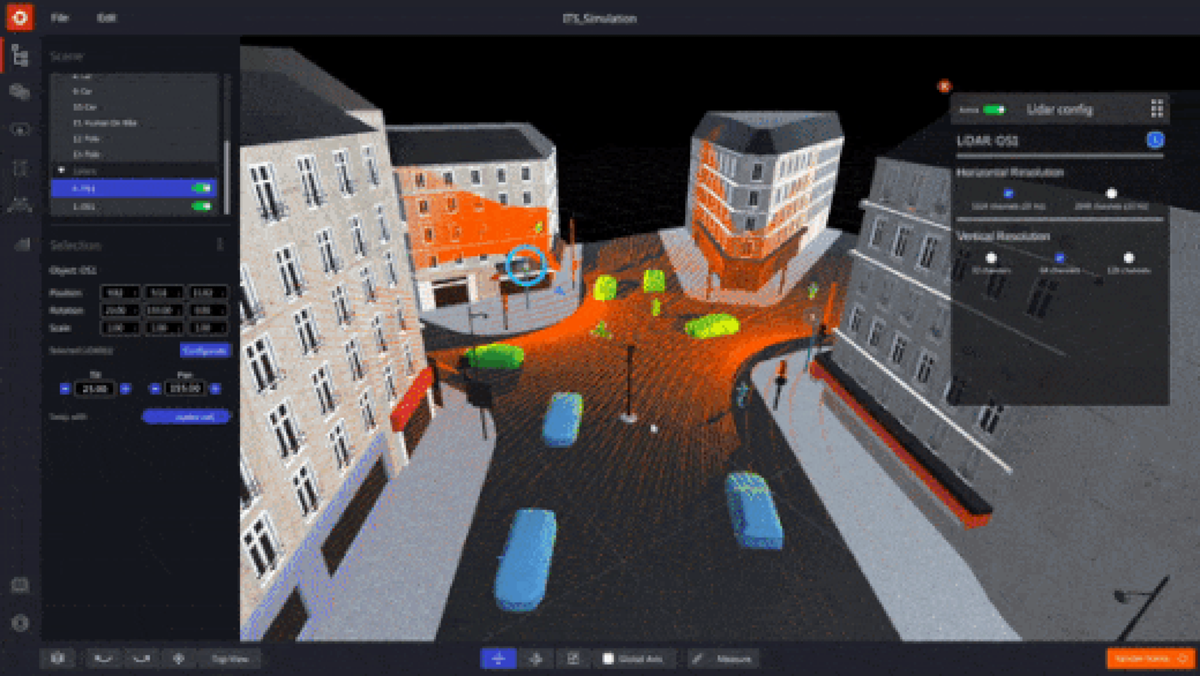
Introducing the Multi-Vendor LiDAR Simulation tool

To learn more, don't miss our latest whitepapers and webinars, or contact a Product Specialist.